Myoelectric Prosthetic Arm
Introduction
The Myoelectric Prosthetic Arm project addresses the need for affordable, functional prosthetic limbs that closely mimic natural human movement. Prosthetic solutions are critical for individuals with limb loss, as they provide a sense of normalcy, independence, and confidence in performing daily tasks. This project leverages electromyography (EMG) technology to interpret muscle signals for controlling the prosthetic, providing a user-friendly, responsive solution for below-elbow amputations.
Objective
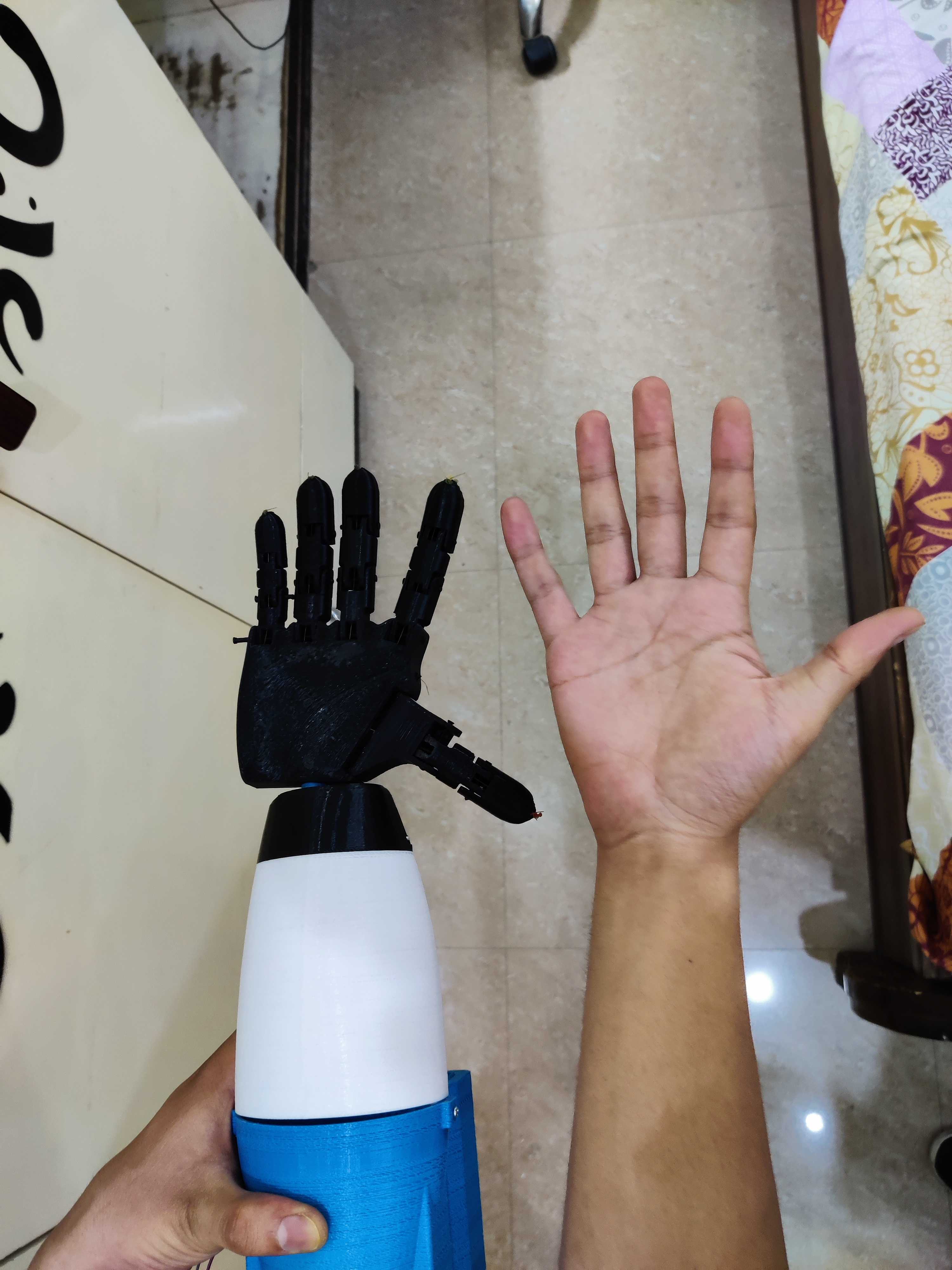
The primary objective of this project is to design and fabricate a prosthetic arm that can be controlled via muscle signals, allowing users to perform basic grasping and holding tasks. The arm aims to emulate the anatomy and movement of a human hand, making it intuitive and comfortable for users to operate. Key goals include affordability, functionality, and user adaptability.
Methodology
- Design and Analysis: Conducted a detailed analysis of human hand anatomy and essential movements for grasping and holding.
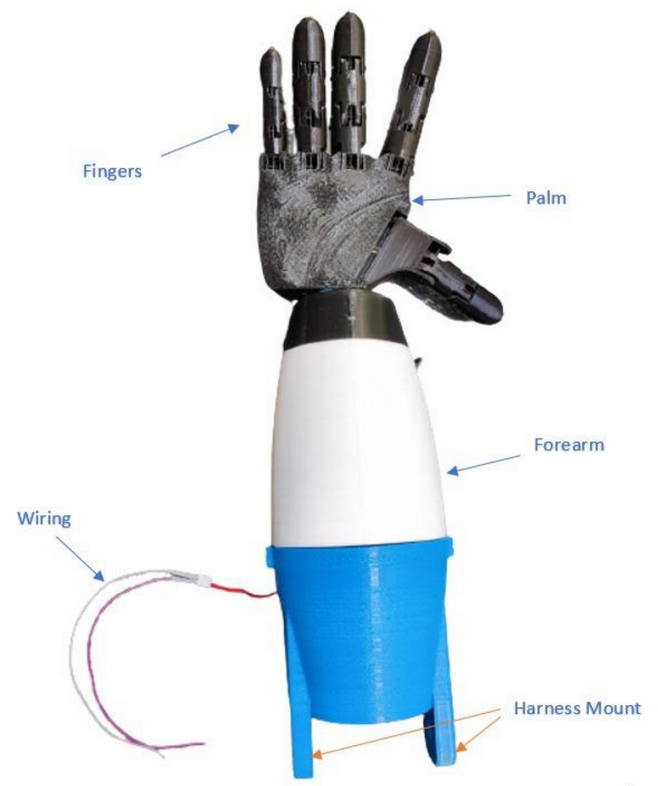
- Fabrication: Constructed the arm using 3D-printed parts, ensuring cost-effectiveness and customizability.
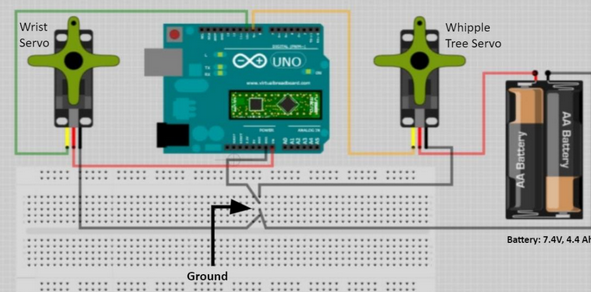
- Mechanical Design: Used a whippletree mechanism for force distribution across fingers, paired with servos for actuation.
- Control System: Incorporated EMG sensors to detect muscle contractions and translate them into commands for the prosthetic.
Results
Testing showed that the prosthetic could perform several types of grasps, demonstrating functional versatility and alignment with basic human hand movements. Although the prototype lacks individual finger control and certain complex movements, it successfully completes fundamental tasks using minimal input. Adaptive grasping, achieved through under-actuation, enhances usability across different object shapes and sizes.
Future Directions
Further work includes refining the harness system for better comfort, adding feedback mechanisms (such as vibration for sensory alerts), and exploring stronger materials to enhance durability. With these improvements, the prosthetic can evolve into a market-ready product that provides increased functionality and independence to users.
Conclusion
This project demonstrates a successful attempt at creating a low-cost, functional prosthetic arm that bridges the gap between simple passive devices and high-cost, advanced prosthetics. It brings forward a promising solution that could significantly impact prosthetic accessibility and functionality, particularly for those needing an affordable, myoelectric solution.
Contribution
This project was my B.Tech capstone, where I led a team of six members in designing and fabricating a Myoelectric Prosthetic Arm. My primary responsibilities included the mechanical design, 3D modeling, 3D printing, and assembly of the prosthetic arm. Additionally, I developed Arduino programs to control the motors and seamlessly integrated the control system with the mechanical housing. I also configured and tested the EMG sensors to ensure the arm's functionality. To refine the design and enhance the arm’s performance, I conducted user testing and feedback sessions. This work was carried out at Punjab Engineering College, Chandigarh, India.
Visuals